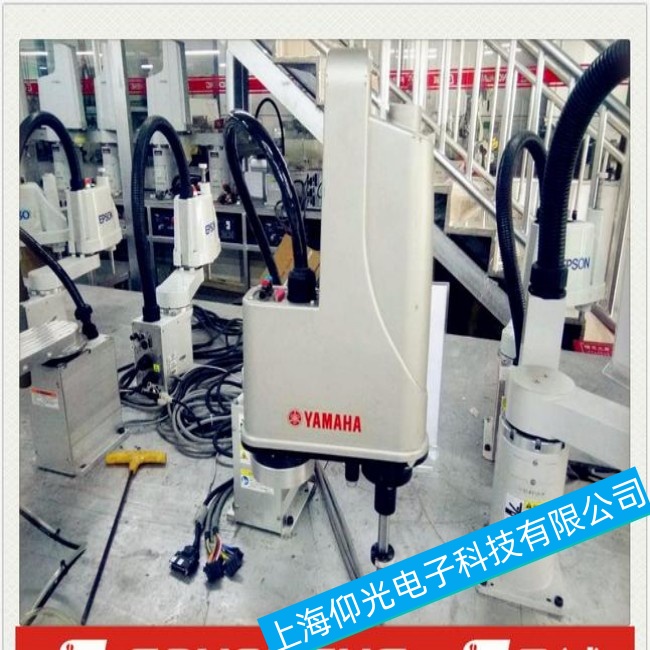
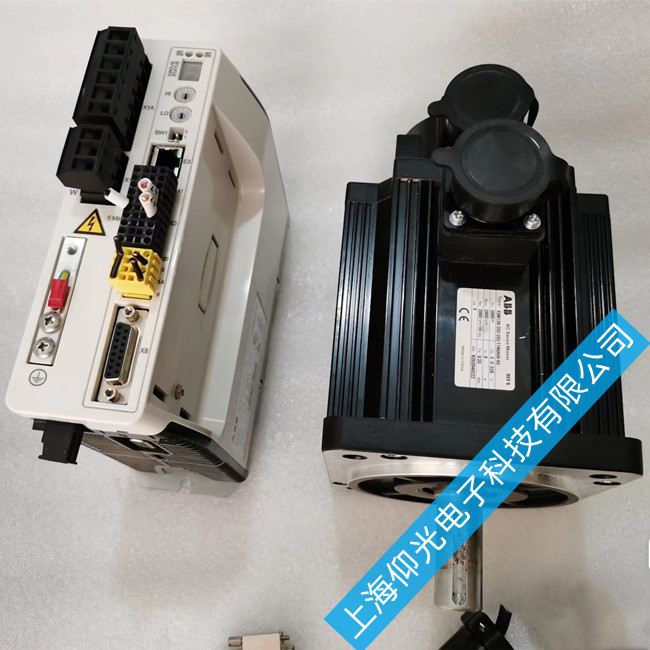
ABB IRB4400���S�C���˲���ֱ���ľS����
��QABB�C���˲���ֱ���Ć��}�����Բ�ȡ���N������
1������У��ABB�C���ˣ�ֹͣ����ǰ�ò������_���C���˰�ȫ�x���\�У�Ȼ���M���P(gu��n)��(ji��)λ�úͷ��������У�ʡ�
2���O(sh��)Ӌ������ABB�C���˽Y(ji��)��(g��u)��ʹABB�C�������w�`��M����С�������߾��Ȃ������M��У�ʡ�
3���ij������ABB�C���˾��̌�(d��o)���䲻��ֱ������Ҫ�ij�������֮ǰ����(y��ng)�˽�ABB�C���˵ęCе�Y(ji��)��(g��u)�����W���ԡ����a�����Ⱥ͂���ϵ�y(t��ng)��
4���z����Q���������O(sh��)�䣺������������oЧ��������Ҫ���Q���ڜy��λ�úͷ���Ă���������������늙C���P(gu��n)�I������
5�����ӑT�Ԝy����Ԫ�������݃x�������ٶ�Ӌ���ȣ�ͨ�^�����ⲿ�������ã��p�����ߕr������Ħ�����՚�������Ӱ푡�
6����(y��u)�������㷨��ʹ�C�����܉�?q��)��r��֪���x���Ƕȡ��ٶȵȅ���(sh��)��������(j��)�@Щ����(sh��)�{(di��o)�����߷���
7���z����������������ߵؙC���˵���ҕ�Б�(y��ng)������ֹ�҉m�ړ���
8���z����{(di��o)���Cе�Y(ji��)��(g��u)����،�����݆�ӡ�߅ˢ���(q��)��݆�ȣ��_���B�������ҟo���D��
9���z����{(di��o)��늙C���ܣ��������늙C����׃����(d��o)�²���ֱ�����Lԇ���Q늙C��
ͨ�^�@Щ������������Ч�ؽ�QABB�C���˲���ֱ���Ć��}��
�҂�
�Ϻ�������ӿƼ�����˾��һ�Ҍ��I(y��)���¹��I(y��)�C���˾S�ޡ��S�o���B(y��ng)�����b�{(di��o)ԇ������N�۵Ȍ��I(y��)���g(sh��)����(w��)����I(y��)���gӭ�S�r(li��n)ϵ�҂���
 ȫ������(w��)�ᾀ��
ȫ������(w��)�ᾀ��